Problems I ran into
The first major blocker was the controller and receiver link. I started with a BETAFPV LiteRadio 2 SE ELRS V3 and ran into pairing, firmware, and flashing issues. I tried multiple software and hardware-level troubleshooting paths, including bootloader / flashing attempts, but the reliable fix was moving to a RadioMaster Boxer ELRS and reworking the control-link setup from there.
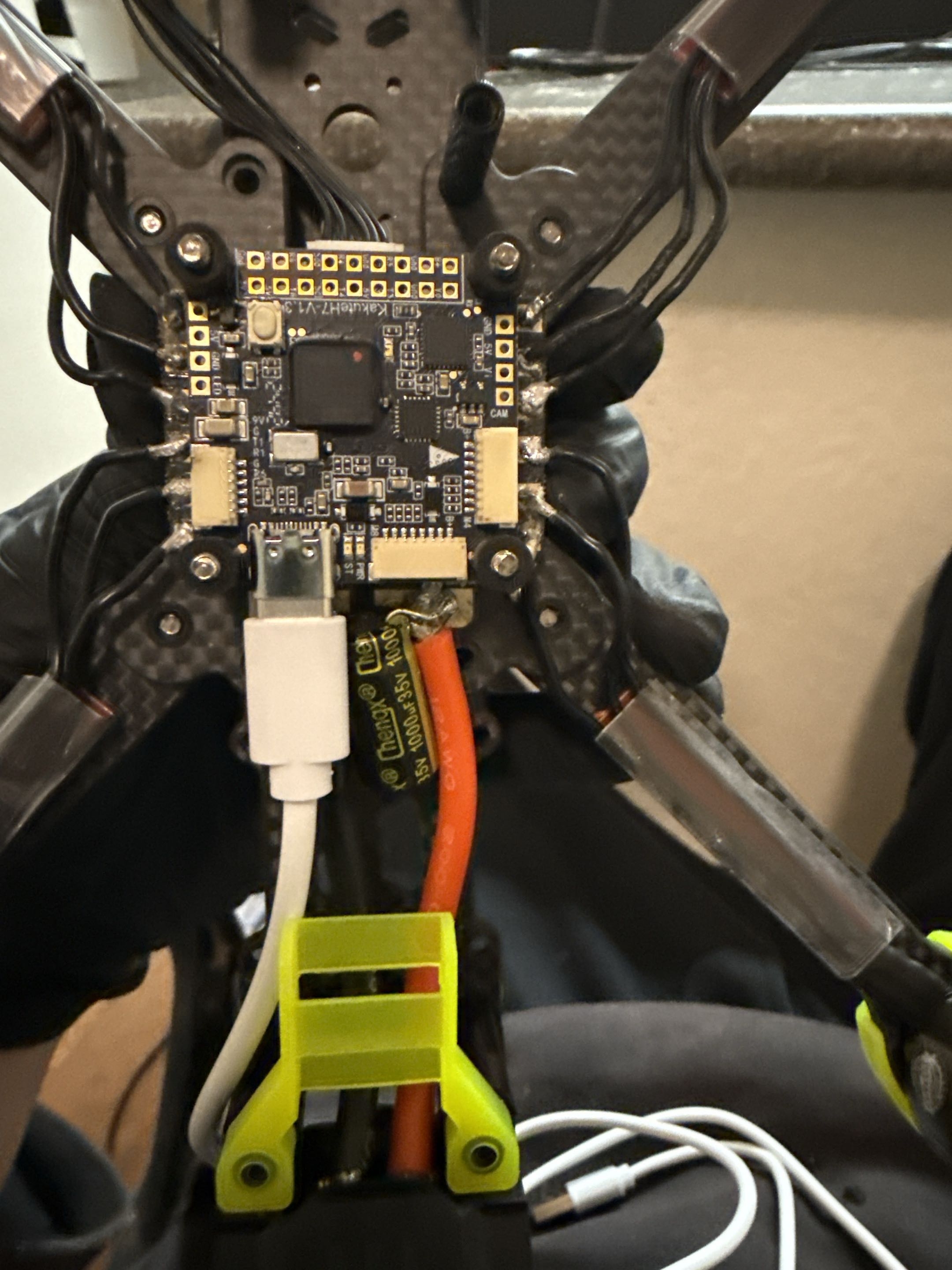
The receiver did not immediately behave as expected in Betaflight. The issue was not only power or binding; the UART and serial receiver configuration also had to line up before Betaflight could see valid receiver input.
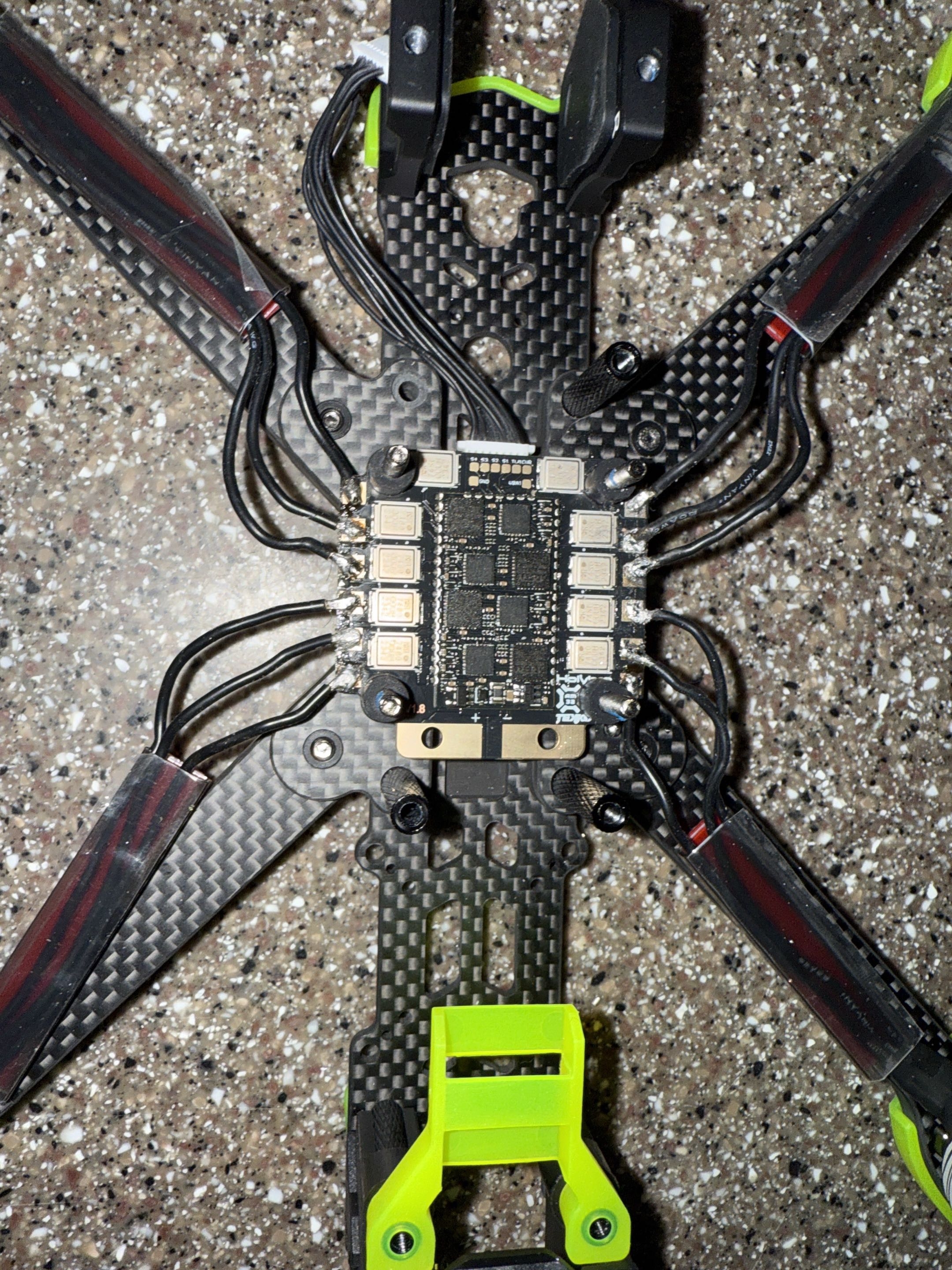
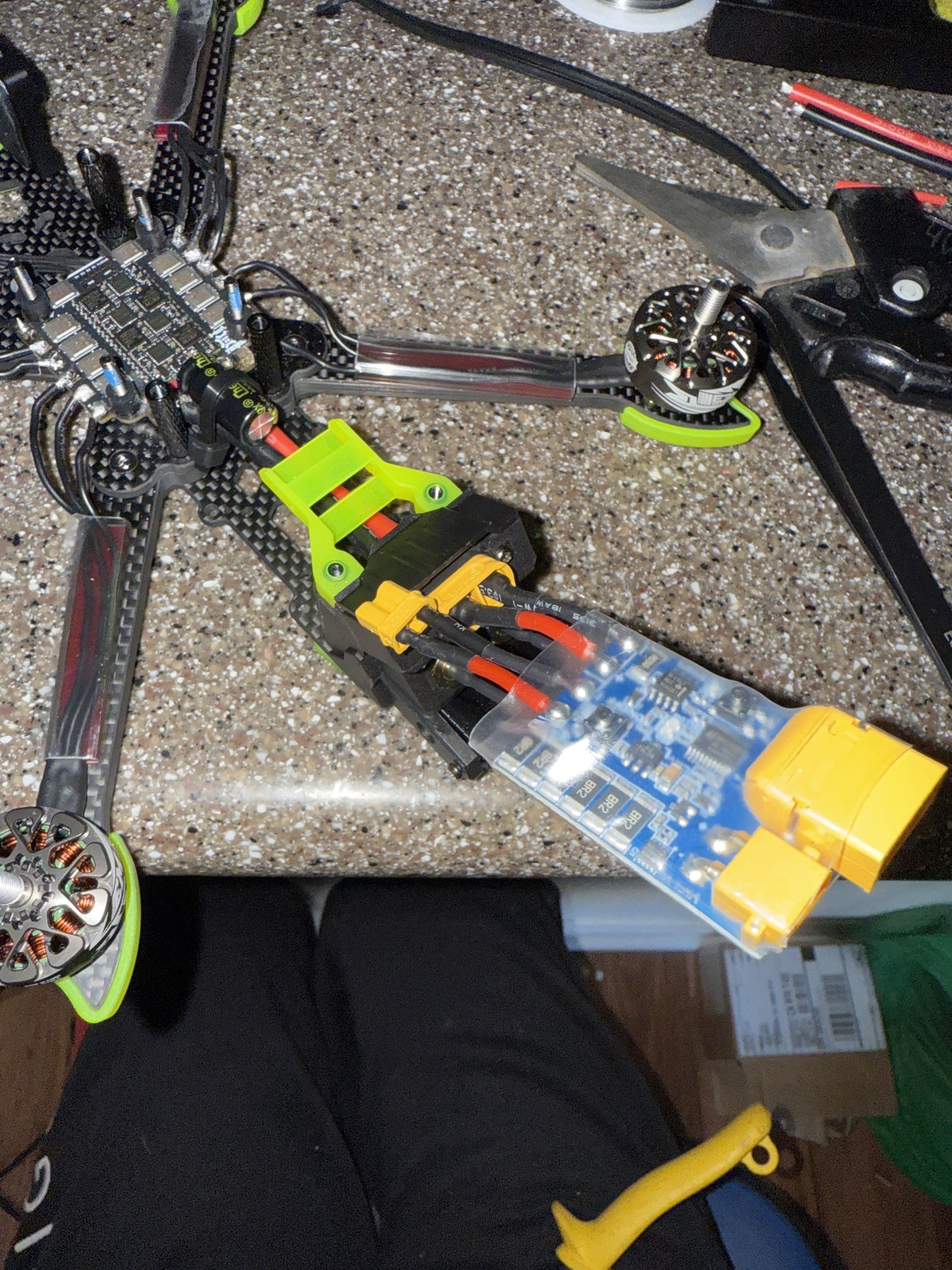
The build exposed arming blockers and ESC telemetry limitations. Motors eventually spun during bench testing, but the ESC telemetry / BLHeli32 path was not cleanly resolved.
The DJI O4 Air Unit exposed a compatibility issue. I bought it for the digital video path, but the flight-controller and video stack I chose were not a clean match. I documented it as hardware I owned, not hardware that was fully integrated into the working build.
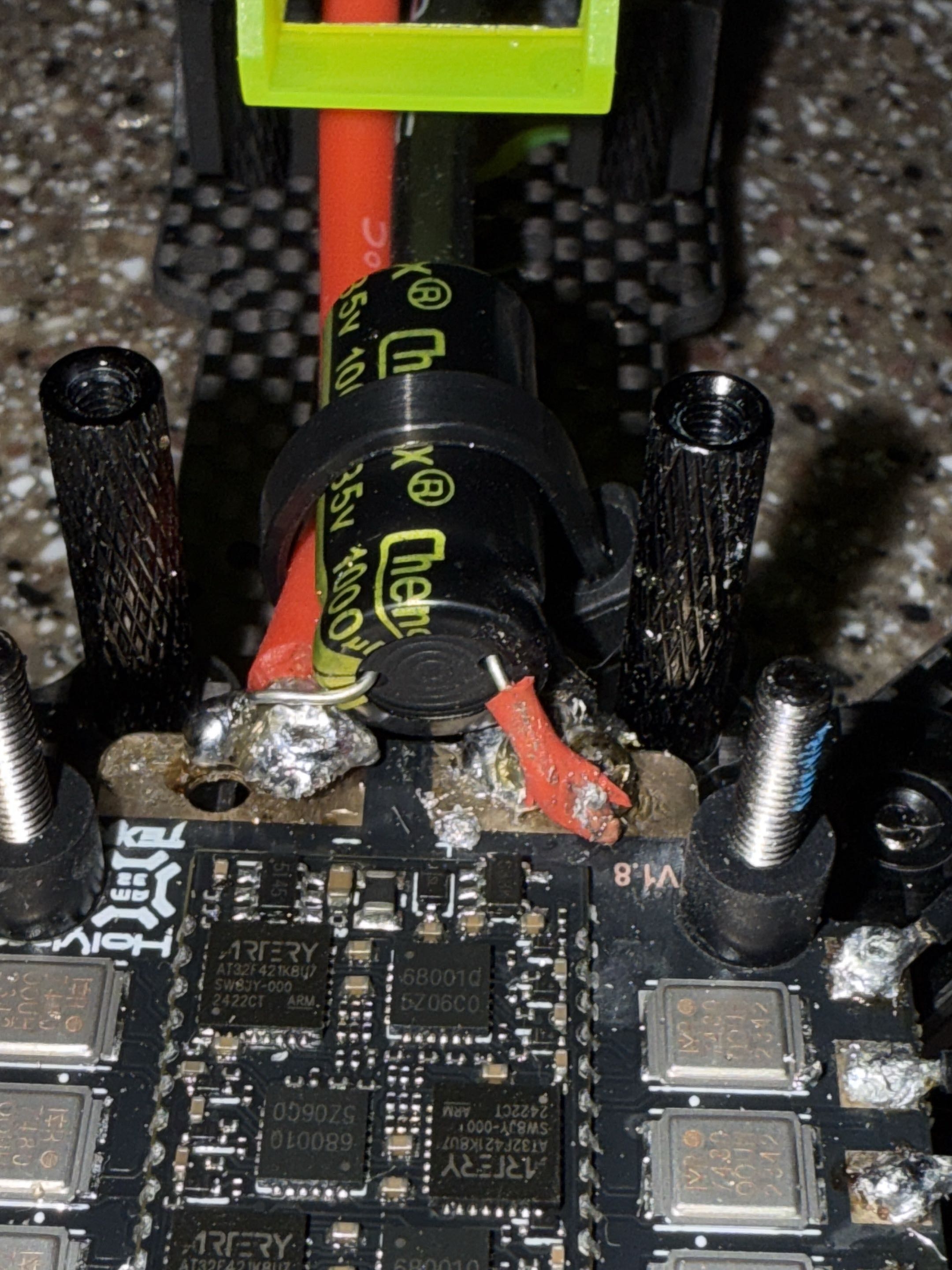
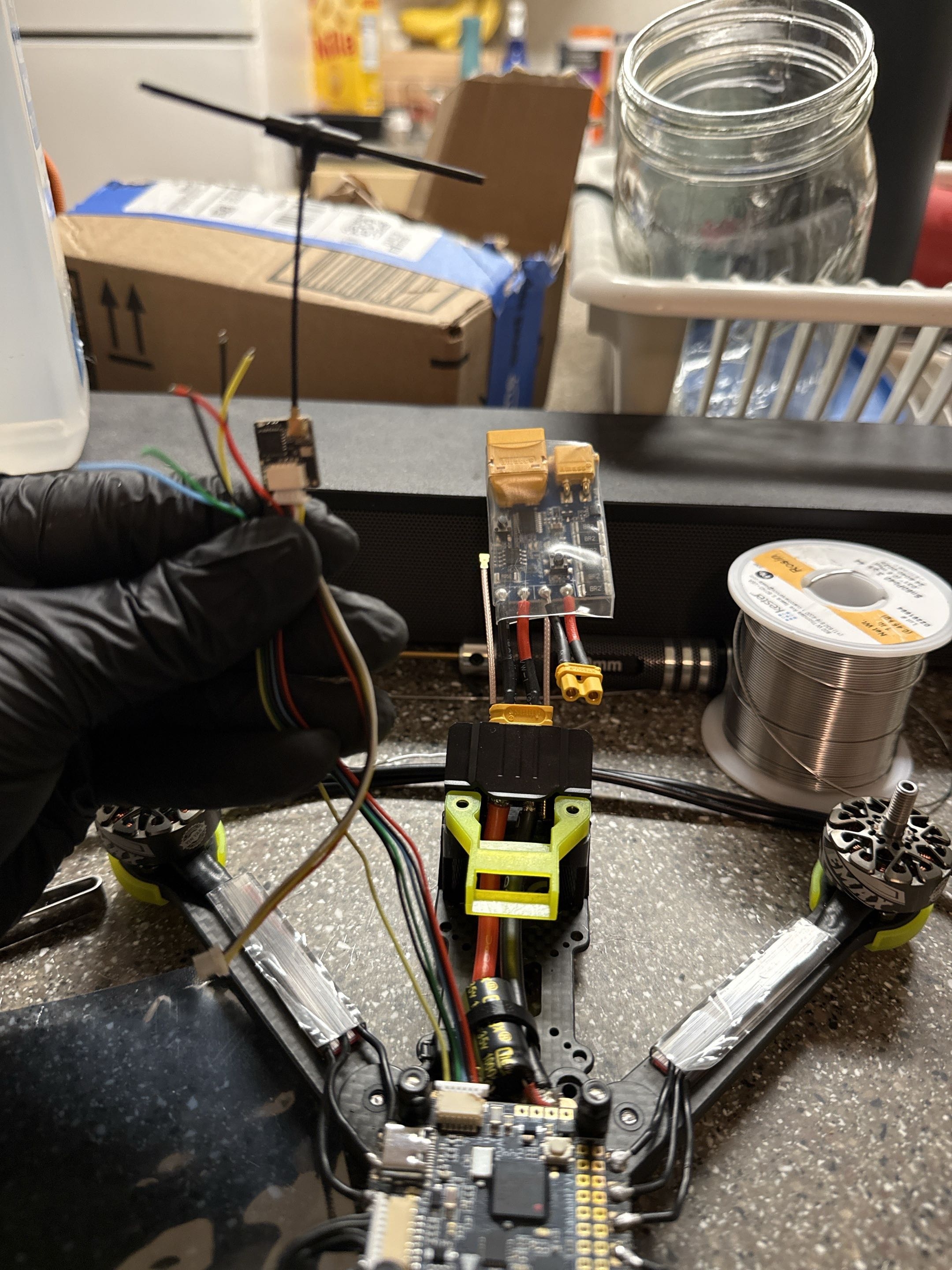
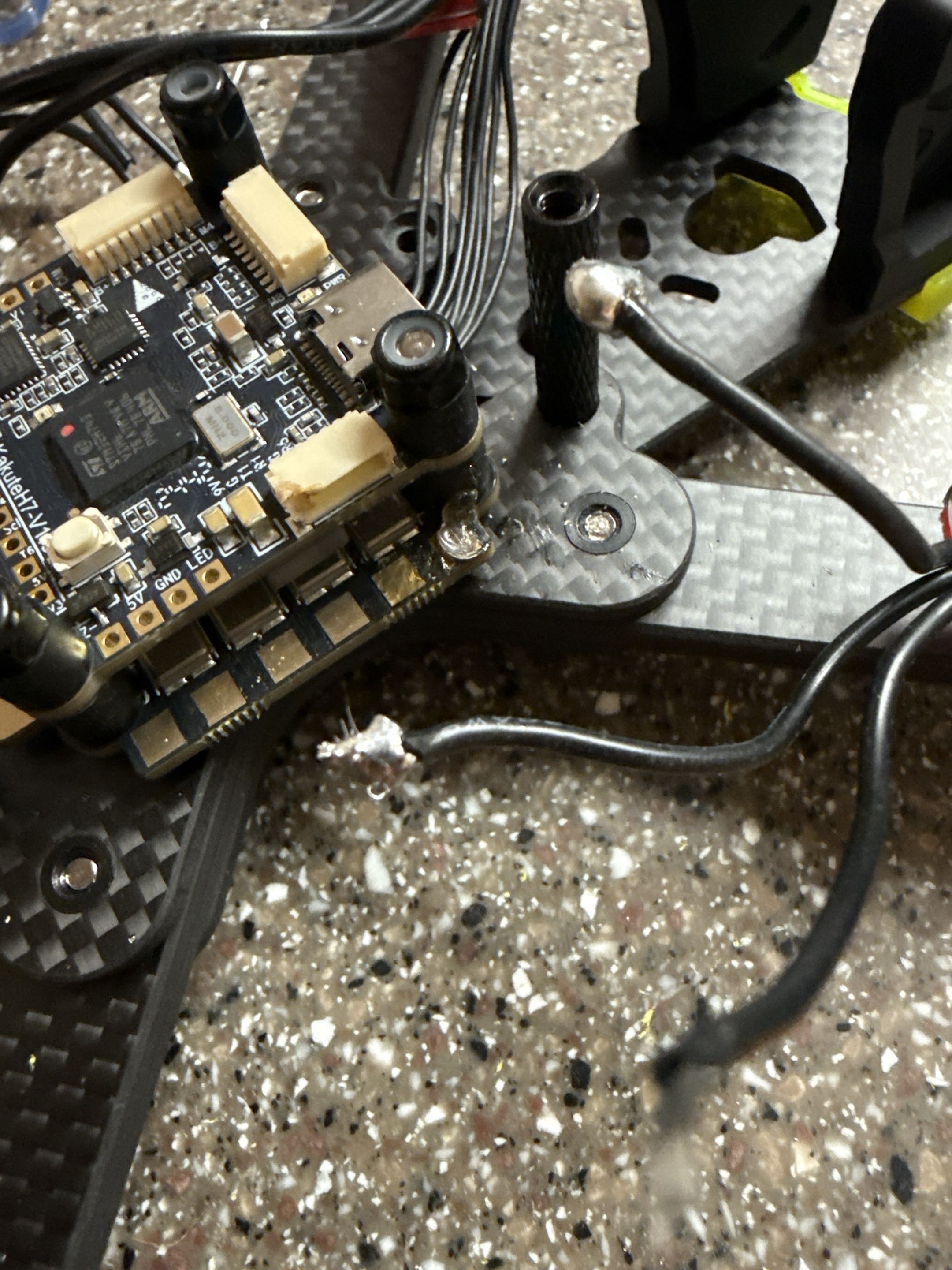
The soldering process was affected by a tool issue: the soldering iron tip was not making reliable thermal contact. I made a temporary crimped contact repair so I could keep working while waiting on better equipment. The current soldering is documented honestly and planned for rework.
The drone did fly, but it was too sensitive for my skill level at the time. The airframe had more power than I was comfortable controlling, so the next step is tuning and controlled flight practice rather than claiming it as a polished aircraft.